產品說明0
※本產品原廠代理從國外進口,有些交期較長,下訂前請詢問!


Arch Mix (102080027)
DESCRIPTION
Arch Mix is a thin, lightweight development board based on NXP i.MX RT1052 processor. This development board comes pre-installed RT-Thread real-time operating system and built-in micro-python. Which makes it suitable for industrial control, especially for scenes with large code and high real-time application requirements.
The i.MX RT1052 is a new processor family featuring NXP’s advanced implementation of the Arm Cortex®-M7 core. Currently, the i.MX RT1052 is the highest performing Cortex-M7 solution delivering 3036 CoreMarks, which is 13 times better than the LPC1788 microcontroller. In addition to the high-speed performance it provides fast real-time responsiveness. The i.MX RT1050 also has rich audio and video features, including LCD display, basic 2D graphics, camera interface, SPDIF, and I2S audio interface.
The RT-Thread is an open source IoT operating system for embedded devices. The kernel has real-time multi-task scheduling, semaphore, mutex, mail box, message queue, signal etc. This is a lightweight system that loads quickly. For more detail about the RTOS, please refer to the Github Page.
Note
RT-Thread has complete and detailed Chinese materials and community resources. Provide a complete set of development tools and debug tools. We will continue to update relevant English materials and resources in our wiki.
FEATURES
- ARM® Cortex®-M7 528MHz microcontroller(NXP i.MX RT1052)
- Comes with real-time operating system RT-Thread
- Build-in micro-python
- Ultra-fast system loading speed
- Rich peripheral interface: RMII, CAN, I2C, UART, CSI, I2S, ADC, SPDIF IN/OUT, SWD
- Smaller than other Demo boards of RT1052/1050: 67mm x 39mm
Application Ideas
- Industrial Control
- Smart Building
- Industrial Human Machine Interfaces
- Automation & Process Control
- Robot
Hardware Overview


Pinout

Block Diagram

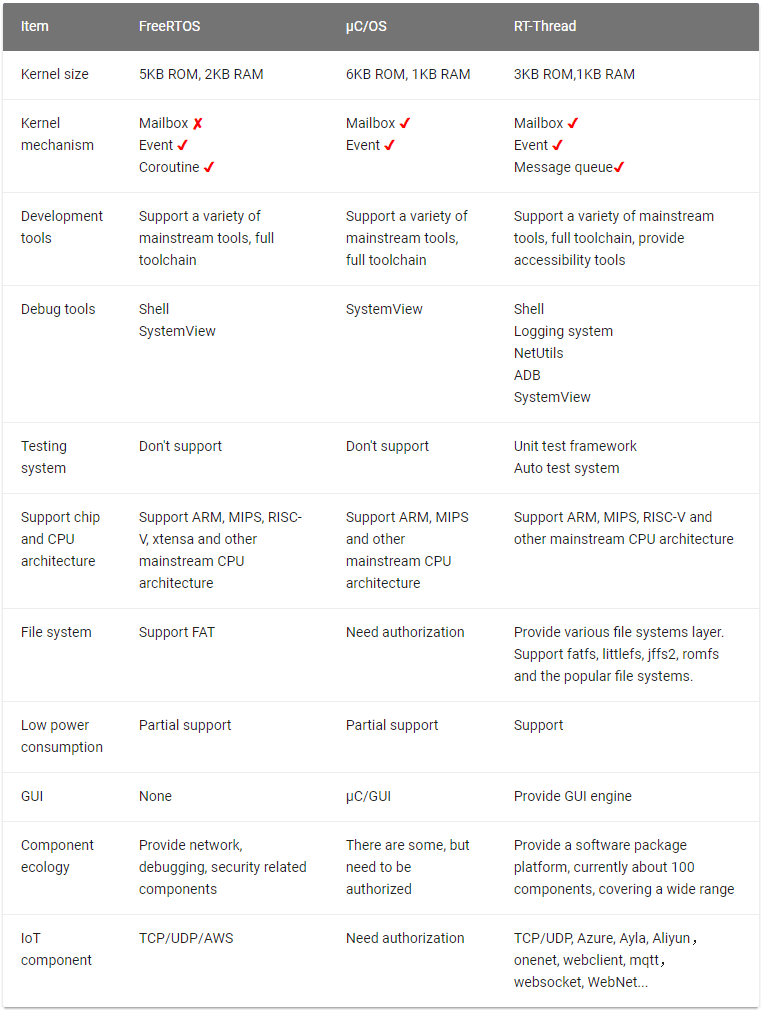
About RT-Thread
The RT-Thread is a mature, lightweight IoT system with a complete ecological chain. The following table illustrates a comparison between the RT-Thread and other RTOS.