產品說明0

GY953 AHRS模塊電子羅盤帶傾斜補償模塊
模塊尺寸:15.5mm*15.5mm
通信方式,1.串口(9600,115200),2.SPI通信(4線)
供電電源:3v-5v 15ma
輸出更新頻率200HZ,
分辨率0.1度
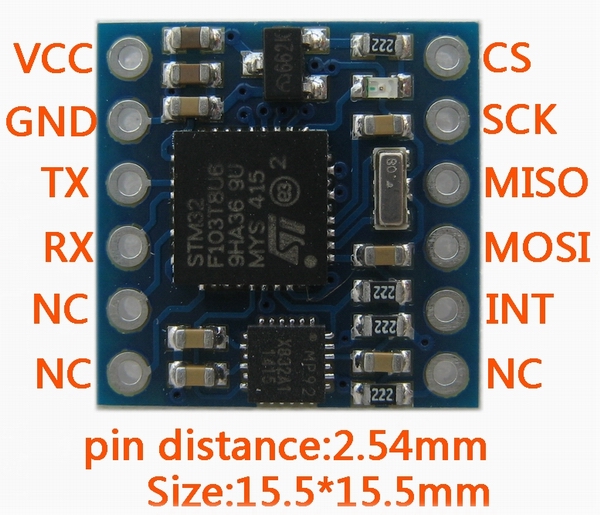
直接輸出:
1.歐拉角(YAW ROLL PITCH)
2.九軸傳感器原始數據(三軸加速度,三軸陀螺儀,三軸磁力計)
3.四元素輸出

自帶傳感器校正命令
有磁力計,航向角不漂移
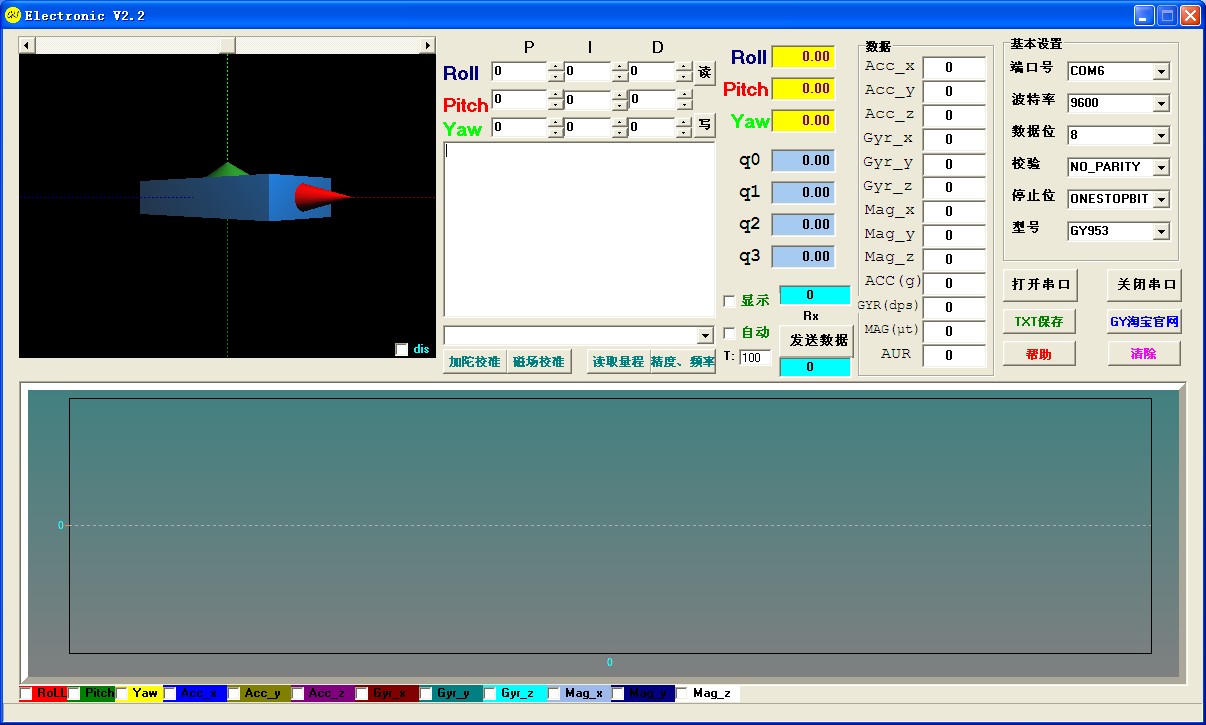
有上位機軟件
現有讀取數據程序(串口與SPI):51單片機,STM32 , ARDUINO
2016.8.1
新增了2條串口指令,方便需要上電即自動輸出的客戶使用:
A5 AD 52 ----------保存自動輸出標誌設置(掉電保存)
A5 AC 51 ----------清除自動輸出標誌設置(掉電保存)
說明:
1.保存自動輸出標誌設置:
上電發送自動輸出指令( A5 45 EA )後,接著發送保存自動輸出標誌設置(A5 AD 52)。
下次上電後直接就是自動輸出模式,不需要發任何指令。
在此模式下,原自動輸出的指令開關功能將不起作用。
2.清除自動輸出標誌設置:
當處於“自動輸出標誌設置”時候,每次上電都自動輸出數據,要想關閉上電自動輸出, 使用查詢模式,需要發送指令(A5 AC 51)。再次上電時候,不再是自動輸出模式。
原始數據轉換實際單位,注意有± :
加速度傳感器(g) =加速度原始數據/16383
陀螺儀傳感器(度/秒)=陀螺儀原始數據/16.4
磁場傳感器(uT) =磁場原始數據/6.7
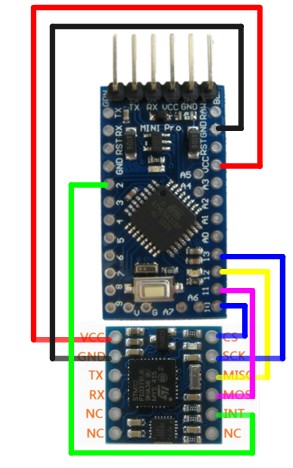
ARDUINO SPI接線圖:
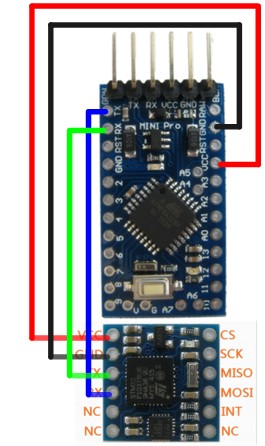
ARDUINO 串口接線接線圖: